
Research on Sliding Mode Robust Synchronous Control Strategy for the Lifting Hydraulic System of a Subsea Drilling Rig Frame
##plugins.themes.bootstrap3.article.sidebar##
##plugins.themes.bootstrap3.article.main##
Abstract
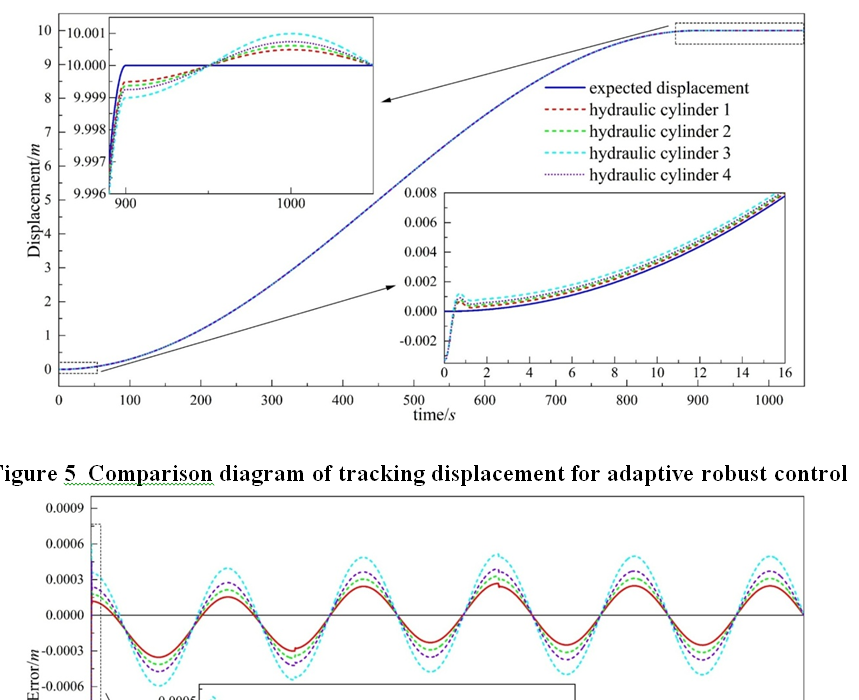
Addressing the challenge of insufficient synchronization accuracy in the four hydraulic cylinders during the lifting and lowering operations of a subsea drilling rig frame, this paper proposes a multi-cylinder synchronous control strategy. This strategy integrates an improved cross-coupling synchronization error, an adaptive parameter law, and sliding mode robust control. A nonlinear dynamic model of the four-cylinder lifting system is established to analyze the interaction mechanism between the coupling forces and displacement errors among the hydraulic cylinders under unbalanced and varying load conditions. On this basis, a sliding mode controller is designed utilizing the cross-coupling error. An adaptive algorithm is introduced to update system parameters online, and a saturation function is employed to suppress sliding mode chattering, thereby enhancing system robustness and synchronization precision. Co-simulations via AMESim and MATLAB/Simulink, along with experimental validation, demonstrate that the proposed control strategy achieves high-precision synchronous motion of the four hydraulic cylinders in both lifting and lowering scenarios. The maximum tracking error is confined to 1.67 mm, and the steady-state error is maintained within 0.48 mm. The strategy effectively mitigates the impact of time-varying loads and external disturbances, significantly improving the stability and reliability of the subsea drilling rig frame during lifting and lowering operations.