
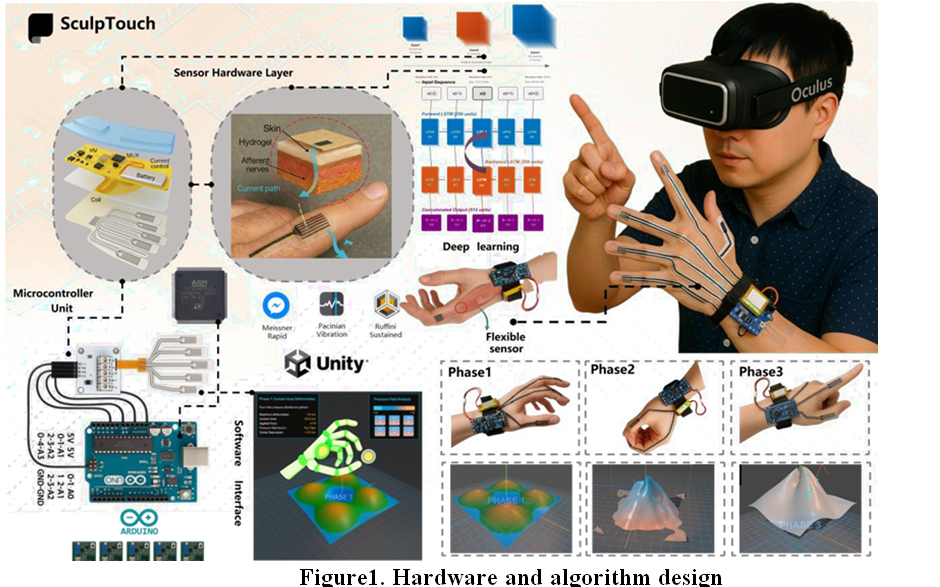
SculpTouch : A Study on Distributed Flexible Capacitive Haptic Sensing with Neural-Enhanced Gesture Recognition for High-Fidelity Virtual Reality Interaction
##plugins.themes.bootstrap3.article.sidebar##
##plugins.themes.bootstrap3.article.main##
Abstract
Virtual reality sculpting tools currently lack the tactile feedback essential for teaching material manipulation skills in sculptural education, limiting their pedagogical effectiveness compared to traditional hands-on training. This study presents SculpTouch, a haptic interface system that addresses this gap through distributed force sensing using finger-mounted capacitive sensor arrays (4×4 electrodes) sampling at 40 kHz. The system implements a three-phase modeling workflow mimicking traditional clay sculpting: form stroking through palm pressure, material carving with precise finger movements, and detail pinching using thumb-index coordination. Neural network processing combining convolutional layers and bidirectional LSTMs enables real-time gesture recognition. SculpTouch achieved 0.38 mm spatial accuracy, sub-4 ms latency, 0.01 N force resolution, and 94.8% gesture classification accuracy across 25 participants. The system successfully distinguishes compression and tension zones during forming operations and maintains consistent parting lines during detail work, enabling authentic sculptural skill development in virtual environments previously impossible with existing VR tools.